Publications
* indicates the corresponding author and # indicates co-first authorship.
2025
- Genetic Informed Trees (GIT*): Path planning via reinforced genetic programming heuristicsBiomimetic Intelligence and Robotics 2025
-
- Meta-Learning-Based Safety-Critical Control in Multi-Obstacles EnvironmentsIEEE Transactions on Automation Science and Engineering May 2025
- IEEE RALTree-Based Grafting Approach for Bidirectional Motion Planning With Local Subsets OptimizationIEEE Robotics and Automation Letters May 2025
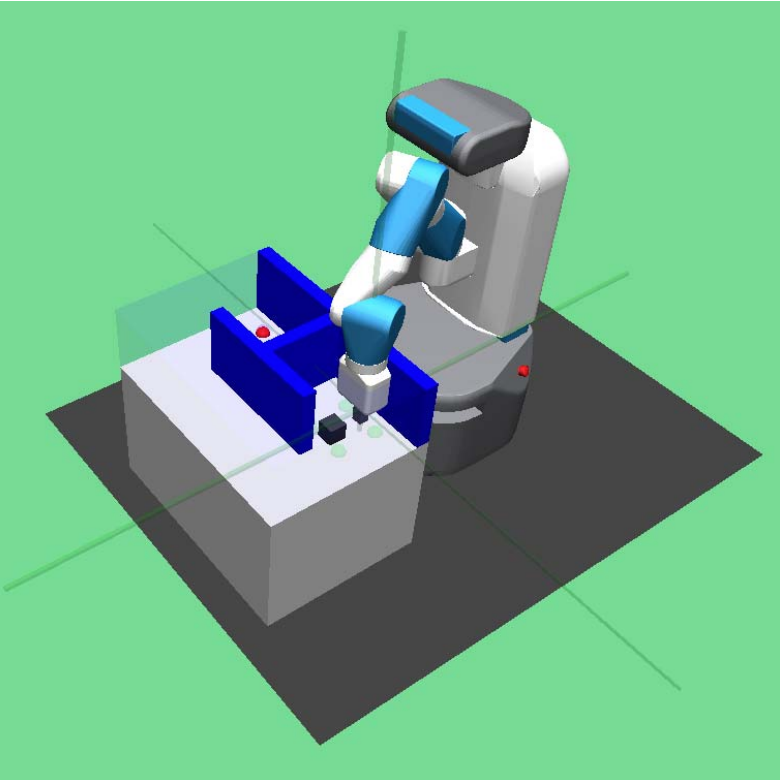
- IEEE TMechLong-Horizon Language-Conditioned Imitation Learning for Robotic ManipulationIEEE/ASME Transactions on Mechatronics May 2025
- Motion planning for robotics: A review for sampling-based plannersBiomimetic Intelligence and Robotics May 2025
- Dynamic event-triggered sliding mode control of networked switched systems with imperfect transmissionsInternational Journal of Robust and Nonlinear Control May 2025
- T-ASEAdaptive Oscillation-Suppression Control for Distributed Nonholonomic Vehicle Safe Formation With Nested Input SaturationIEEE Transactions on Automation Science and Engineering May 2025
- JFRAutoMine: A Multimodal Dataset for Robot Navigation in Open-Pit MinesJournal of Field Robotics May 2025

2024
-
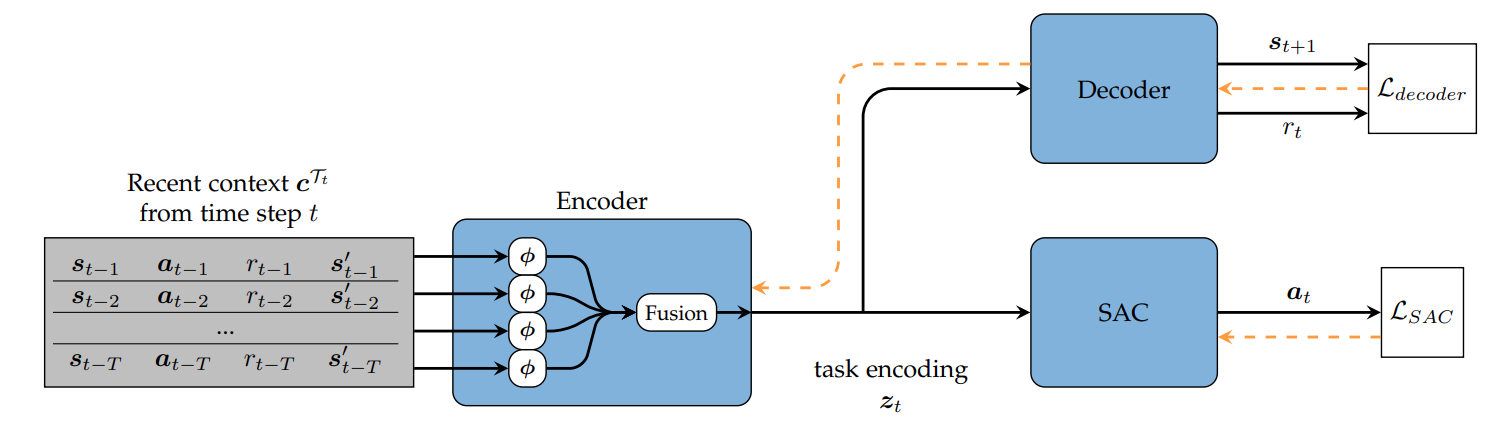
 Context-Based Meta-Reinforcement Learning With Bayesian Nonparametric ModelsIEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) May 2024
Context-Based Meta-Reinforcement Learning With Bayesian Nonparametric ModelsIEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) May 2024 - AFMHumidity Stable Thermoelectric Hybrid Materials Toward a Self-Powered Triple Sensing SystemAdvanced Functional Materials May 2024
- IEEEUnstrPrompt: Large language model prompt for driving in unstructured scenariosIEEE Journal of Radio Frequency Identification May 2024
- TIIEfficient Stereo Matching Using Swin Transformer and Multilevel Feature Consistency in Autonomous Mobile SystemsIEEE Transactions on Industrial Informatics May 2024
- TIVMiningllm: Towards mining 5.0 via large language models in autonomous driving and smart miningIEEE Transactions on Intelligent Vehicles May 2024
- Nano EnergyA multi-dimensional tactile perception system based on triboelectric sensors: towards intelligent sorting without seeingNano Energy May 2024
- ICRAContact Energy Based Hindsight Experience PrioritizationIn 2024 IEEE International Conference on Robotics and Automation (ICRA) May 2024
- ICRA1 khz behavior tree for self-adaptable tactile insertionIn 2024 IEEE International Conference on Robotics and Automation (ICRA) May 2024
- TSMCEvent-Triggered Fuzzy Yaw Control of Six-Wheel Skid-Steer VehiclesIEEE Transactions on Systems, Man, and Cybernetics: Systems May 2024
-
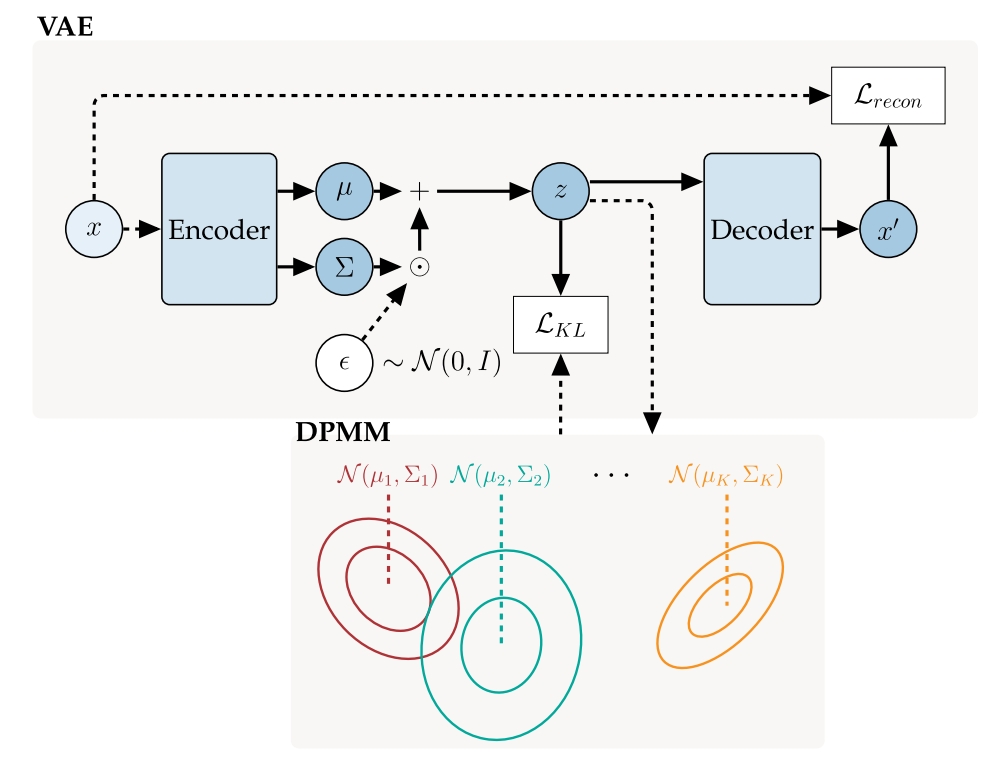
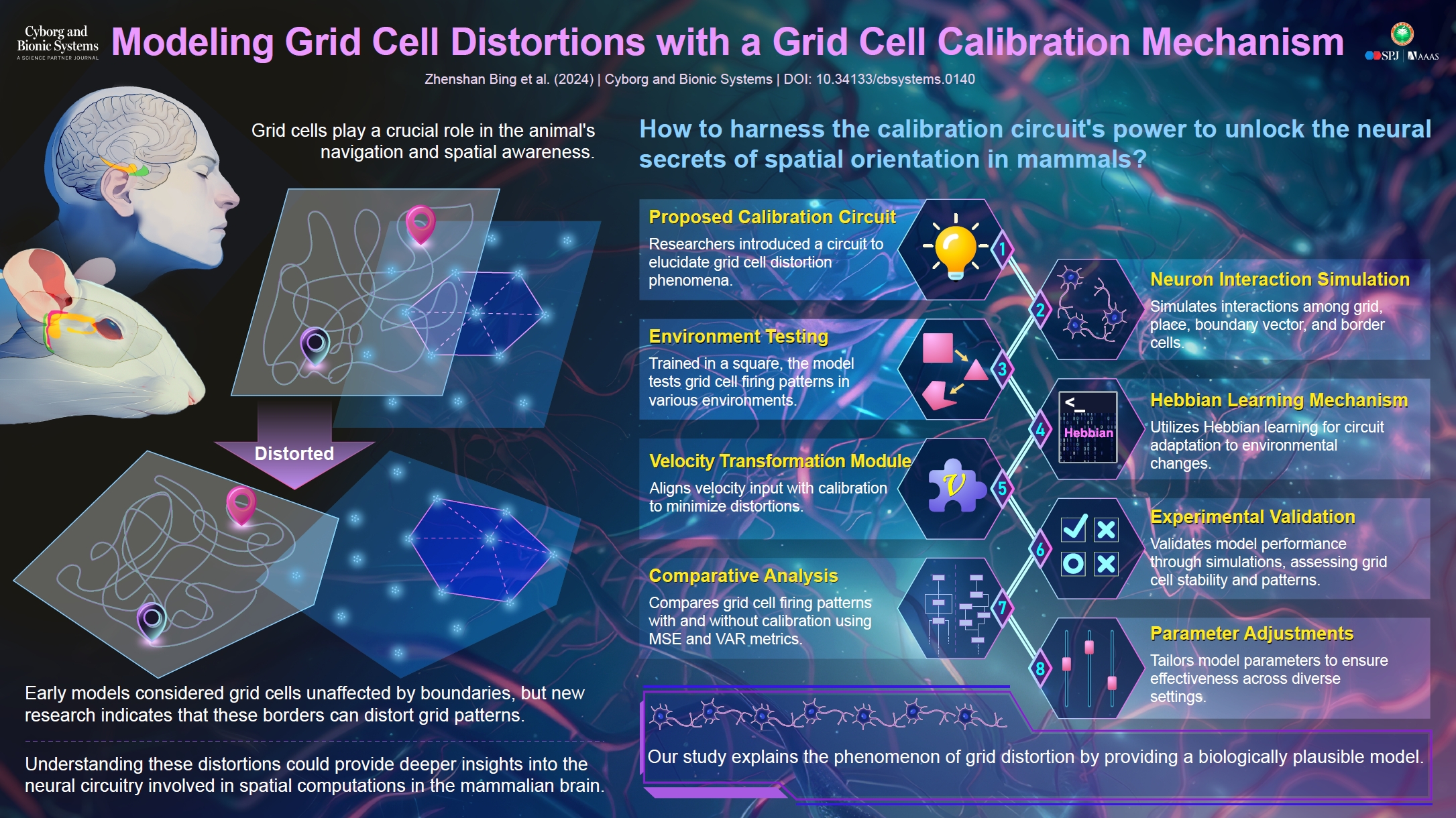 Modeling Grid Cell Distortions with a Grid Cell Calibration MechanismCyborg and Bionic Systems May 2024
Modeling Grid Cell Distortions with a Grid Cell Calibration MechanismCyborg and Bionic Systems May 2024 -
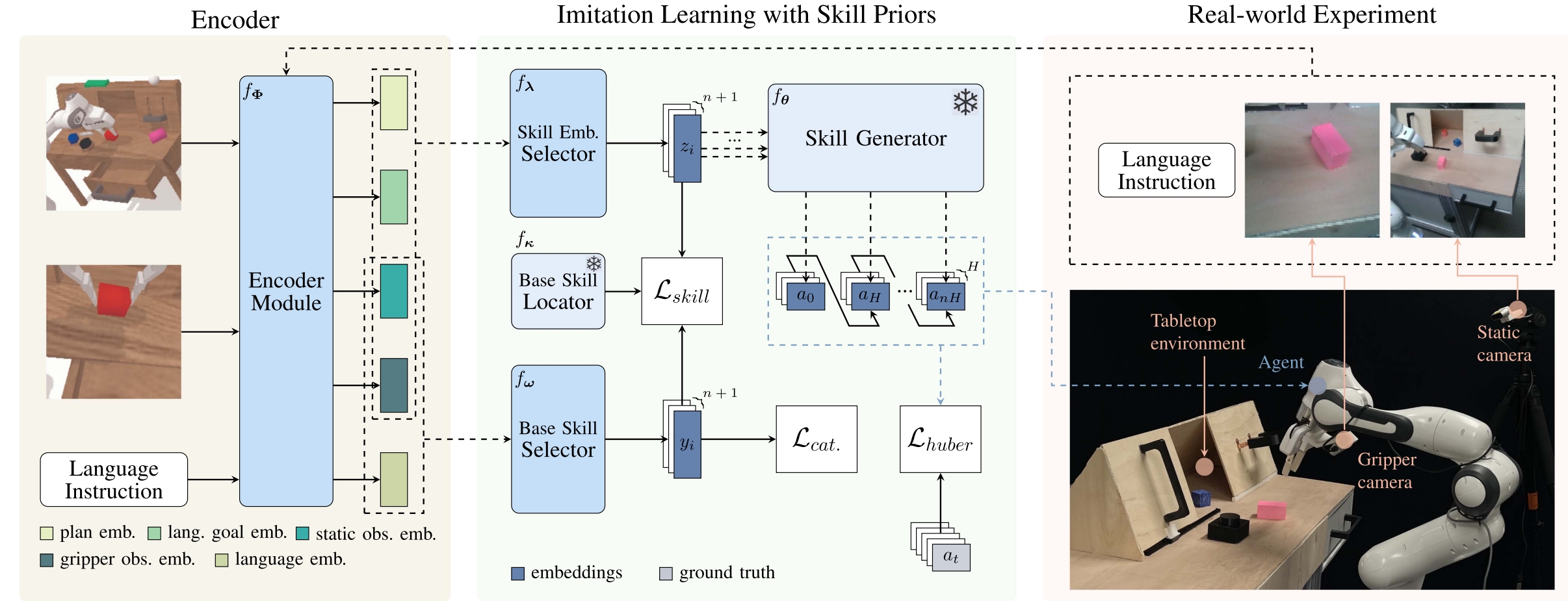 Language-conditioned imitation learning with base skill priors under unstructured dataIEEE Robotics and Automation Letters May 2024
Language-conditioned imitation learning with base skill priors under unstructured dataIEEE Robotics and Automation Letters May 2024 -
 Modulating emotional states of rats through a rat-like robot with learned interaction patternsNature Machine Intelligence May 2024
Modulating emotional states of rats through a rat-like robot with learned interaction patternsNature Machine Intelligence May 2024 - Online Triangular Constraint Calibration for LiDAR and Cameras in Open-Pit MinesIEEE Transactions on Field Robotics May 2024
- IROSOntology Based AI Planning and Scheduling for Robotic AssemblyIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) May 2024
- IROSIMU Based Pose Reconstruction and Closed-loop Control for Soft Robotic ArmsIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) May 2024
- IROSFlexible Informed Trees (FIT*): Adaptive Batch-Size Approach in Informed Sampling-Based Path PlanningIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) May 2024
- IROSElliptical K-Nearest Neighbors - Path Optimization via Coulomb’s Law and Invalid Vertices in C-space ObstaclesIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) May 2024
- IROSOnline Efficient Safety-Critical Control for Mobile Robots in Unknown Dynamic Multi-Obstacle EnvironmentsIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) May 2024
2023

2022
-
 Solving Robotic Manipulation with Sparse Reward Reinforcement Learning via Graph-Based Diversity and ProximityIEEE Transactions on Industrial Electronics 2022
Solving Robotic Manipulation with Sparse Reward Reinforcement Learning via Graph-Based Diversity and ProximityIEEE Transactions on Industrial Electronics 2022 - TFSReduced-Model Based Fault Detector and Controller Design for Discrete-Time Switching Fuzzy SystemsIEEE Transactions on Fuzzy Systems 2022
-
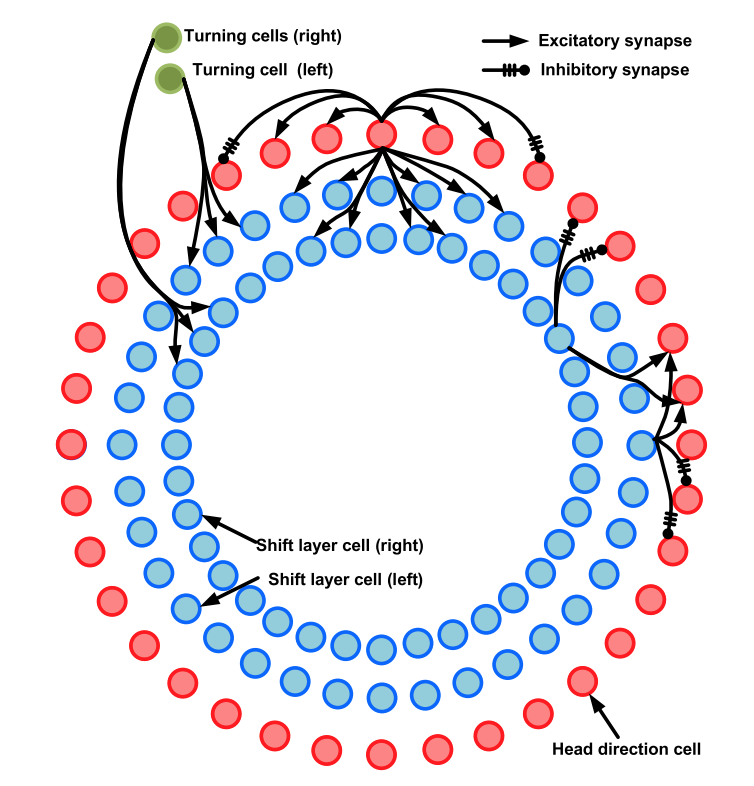 Toward Cognitive Navigation: Design and Implementation of a Biologically Inspired Head Direction Cell NetworkIEEE Transactions on Neural Networks and Learning Systems 2022
Toward Cognitive Navigation: Design and Implementation of a Biologically Inspired Head Direction Cell NetworkIEEE Transactions on Neural Networks and Learning Systems 2022 - IEEE IVA Biologically-Inspired Global Localization System for Mobile Robots Using LiDAR SensorIn 2022 IEEE Intelligent Vehicles Symposium (IV) 2022

2021
-
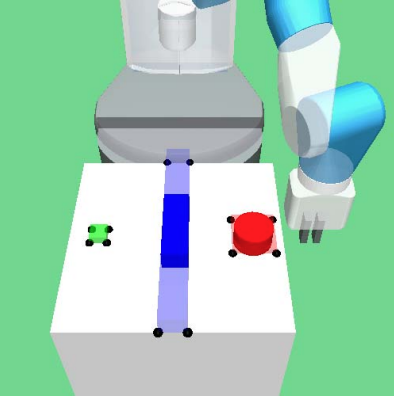 Robotic Manipulation in Dynamic Scenarios via Bounding-Box-Based Hindsight Goal GenerationIEEE Transactions on Neural Networks and Learning Systems 2021
Robotic Manipulation in Dynamic Scenarios via Bounding-Box-Based Hindsight Goal GenerationIEEE Transactions on Neural Networks and Learning Systems 2021 -
 Complex Robotic Manipulation via Graph-Based Hindsight Goal GenerationIEEE Transactions on Neural Networks and Learning Systems 2021
Complex Robotic Manipulation via Graph-Based Hindsight Goal GenerationIEEE Transactions on Neural Networks and Learning Systems 2021 -
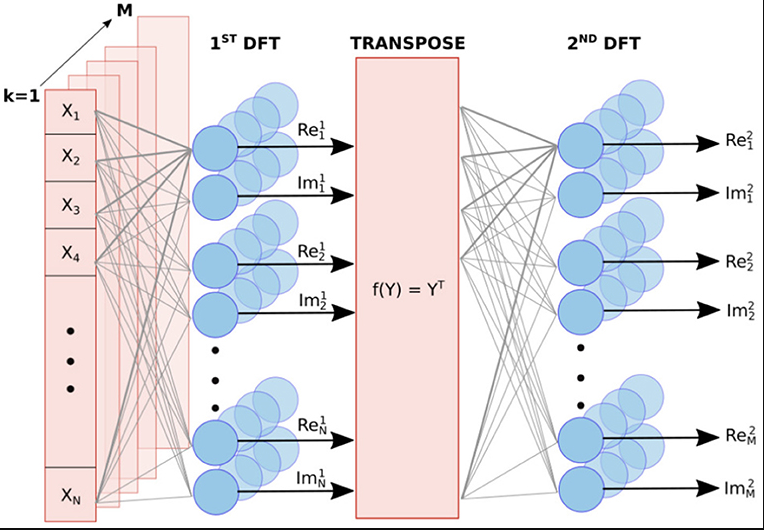 Spiking Neural Network for Fourier Transform and Object Detection for Automotive RadarFrontiers in Neurorobotics 2021
Spiking Neural Network for Fourier Transform and Object Detection for Automotive RadarFrontiers in Neurorobotics 2021 - arXivA Biologically Inspired Simultaneous Localization and Mapping System Based on LiDAR SensorarXiv preprint arXiv:2109.12910 2021
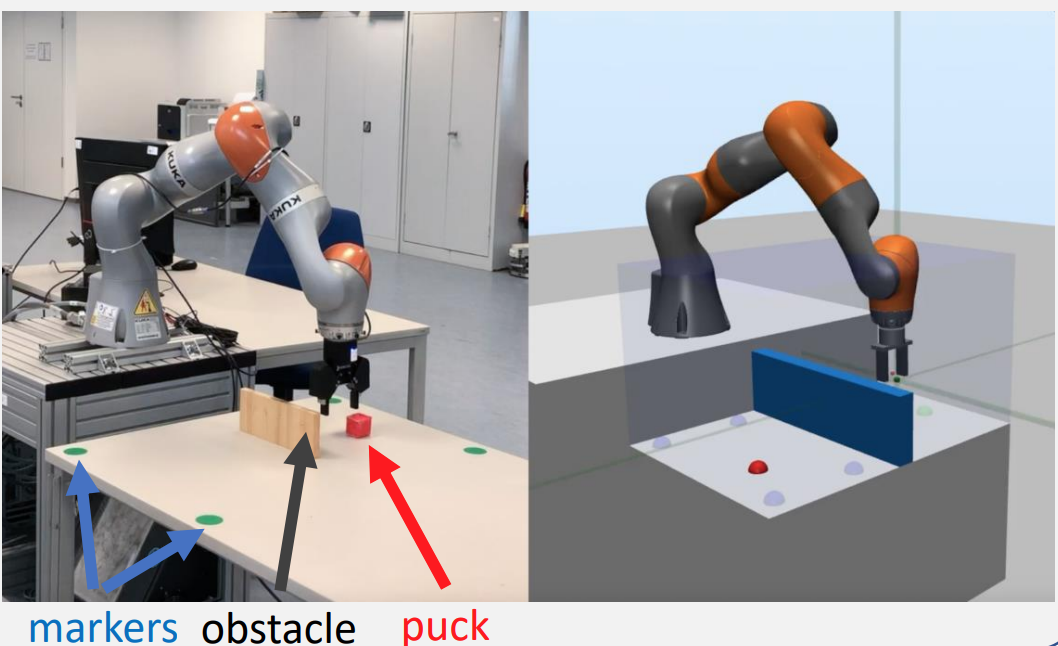
- arXivMeta-Reinforcement Learning in Broad and Non-Parametric EnvironmentsarXiv preprint arXiv:2108.03718 2021
- IJARSDesign and evaluation of the target spray platformInternational Journal of Advanced Robotic Systems 2021
2020
- Neural NetworksEnergy-efficient and damage-recovery slithering gait design for a snake-like robot based on reinforcement learning and inverse reinforcement learningNeural Networks 2020
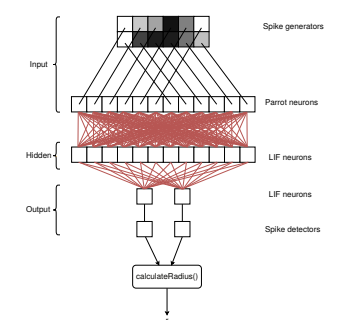
- IROSTarget Tracking Control of a Wheel-less Snake Robot Based on a Supervised Multi-layered SNNIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
- FrontiersPerception-Action Coupling Target Tracking Control for a Snake Robot via Reinforcement LearningFrontiers in Neurorobotics 2020
2019
-
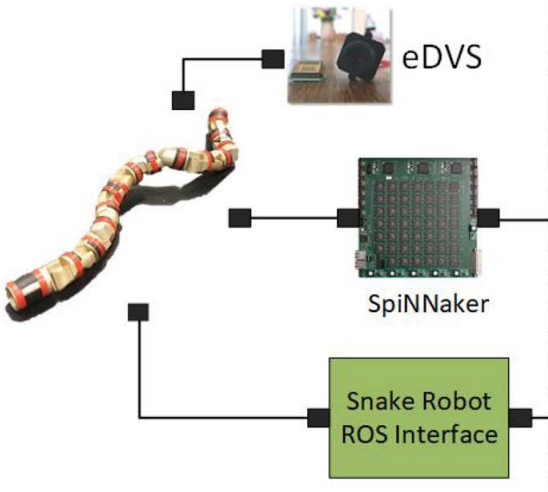 Toward Brain-Inspired Learning With the Neuromorphic Snake-Like Robot and the Neurorobotic PlatformIEEE Transactions on Cognitive and Developmental Systems 2019
Toward Brain-Inspired Learning With the Neuromorphic Snake-Like Robot and the Neurorobotic PlatformIEEE Transactions on Cognitive and Developmental Systems 2019 -
 End to End Learning of a Multi-Layered Snn Based on R-Stdp for a Target Tracking Snake-Like RobotIn 2019 International Conference on Robotics and Automation (ICRA) 2019
End to End Learning of a Multi-Layered Snn Based on R-Stdp for a Target Tracking Snake-Like RobotIn 2019 International Conference on Robotics and Automation (ICRA) 2019 -
 Supervised Learning in SNN via Reward-Modulated Spike-Timing-Dependent Plasticity for a Target Reaching VehicleFrontiers in Neurorobotics 2019
Supervised Learning in SNN via Reward-Modulated Spike-Timing-Dependent Plasticity for a Target Reaching VehicleFrontiers in Neurorobotics 2019 -
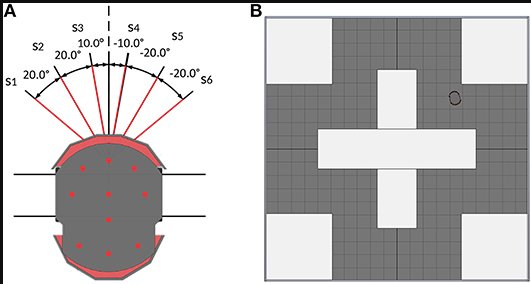
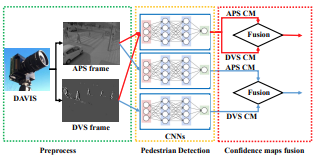 Mixed Frame Event-Driven Fast Pedestrian DetectionIn 2019 International Conference on Robotics and Automation (ICRA) 2019
Mixed Frame Event-Driven Fast Pedestrian DetectionIn 2019 International Conference on Robotics and Automation (ICRA) 2019 -
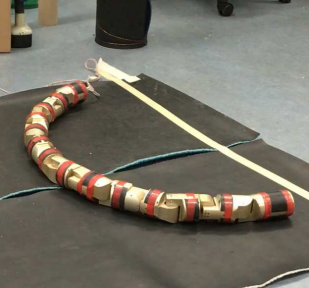
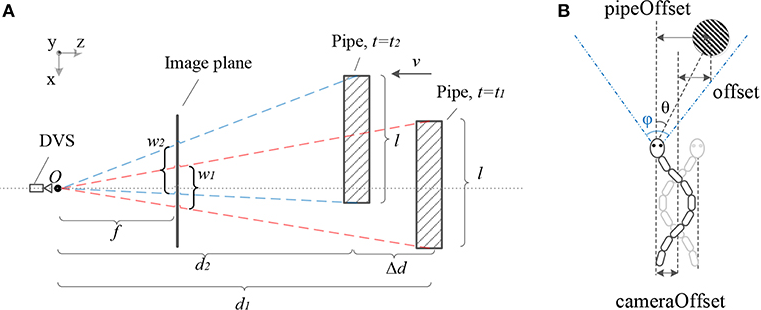 Retina-Based Pipe-Like Object Tracking Implemented Through Spiking Neural Network on a Snake RobotFrontiers in Neurorobotics 2019
Retina-Based Pipe-Like Object Tracking Implemented Through Spiking Neural Network on a Snake RobotFrontiers in Neurorobotics 2019 - ThesisBiological-inspired Hierarchical Control of a Snake-like Robot for Autonomous Locomotion2019
- Peak Temperature Minimization for Hard Real-Time Systems Using DVS and DPMJournal of Circuits, Systems and Computers 2019
- DVSNeuromorphic Vision Datasets for Pedestrian Detection, Action Recognition, and Fall DetectionFrontiers in Neurorobotics 2019
- IJCAIEnergy-Efficient Slithering Gait Exploration for a Snake-Like Robot Based on Reinforcement LearningIn Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, IJCAI-19 Jul 2019
2018
-
 End to End Learning of Spiking Neural Network Based on R-STDP for a Lane Keeping VehicleIn 2018 IEEE International Conference on Robotics and Automation (ICRA) Jul 2018
End to End Learning of Spiking Neural Network Based on R-STDP for a Lane Keeping VehicleIn 2018 IEEE International Conference on Robotics and Automation (ICRA) Jul 2018 - surveyA Survey of Robotics Control Based on Learning-Inspired Spiking Neural NetworksFrontiers in Neurorobotics Jul 2018
- IEEE-HFRTeleoperation Snake Robots with Panorama VisionIn 2018 11th International Workshop on Human Friendly Robotics (HFR) Jul 2018
- DVSNeuromorphic vision based multivehicle detection and tracking for intelligent transportation systemJournal of advanced transportation Jul 2018
2017
-
 Towards autonomous locomotion: CPG-based control of smooth 3D slithering gait transition of a snake-like robotBioinspiration &\mathsemicolon Biomimetics Apr 2017
Towards autonomous locomotion: CPG-based control of smooth 3D slithering gait transition of a snake-like robotBioinspiration &\mathsemicolon Biomimetics Apr 2017 -
 CPG-based control of smooth transition for body shape and locomotion speed of a snake-like robotIn 2017 IEEE International Conference on Robotics and Automation (ICRA) Apr 2017
CPG-based control of smooth transition for body shape and locomotion speed of a snake-like robotIn 2017 IEEE International Conference on Robotics and Automation (ICRA) Apr 2017 -
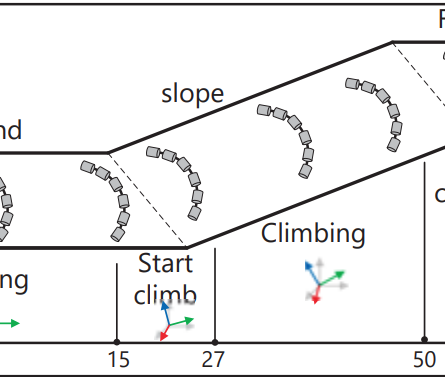 Slope angle estimation based on multi-sensor fusion for a snake-like robotIn 2017 20th International Conference on Information Fusion (Fusion) Apr 2017
Slope angle estimation based on multi-sensor fusion for a snake-like robotIn 2017 20th International Conference on Information Fusion (Fusion) Apr 2017 -
 Towards autonomous locomotion: Slithering gait design of a snake-like robot for target observation and trackingIn 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Apr 2017
Towards autonomous locomotion: Slithering gait design of a snake-like robot for target observation and trackingIn 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Apr 2017 - SpringerOnline multi-object tracking-by-clustering for intelligent transportation system with neuromorphic vision sensorIn Joint German/Austrian Conference on Artificial Intelligence (Künstliche Intelligenz) Apr 2017
- ICNIPEvent-based target tracking control for a snake robot using a dynamic vision sensorIn International Conference on Neural Information Processing Apr 2017
- ROBIOSnake-like robot climbs inside different pipesIn 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO) Apr 2017