Embodied Intelligence and Robotic Systems (EMBODICA) Lab
School of Intelligence and Science Technology
Nanjing University (Suzhou Campus)
Join us
We welcome undergraduate/graduate students, post-docs, research assistants and visiting interns/scholars. Please drop me an email if you are interested in our group. For more details, please refer to Join us.
课题组长期欢迎优秀的同学加入(详见:招生说明页):
关于 2026 年研究生招生:还有 26年保研、考研硕士名额若干; 关于 2027 年研究生招生:27年考核制博士生名额若干位,硕士名额若干。
欢迎有 具身智能、机器人、人工智能、机电一体化、自动化、机器人硬件开发等相关方向科研经历、学科竞赛获奖的同学邮件联系我。 此外也接收对相关方向感兴趣的本科同学进组学习与科研。
Highlights
Headline of Science website.

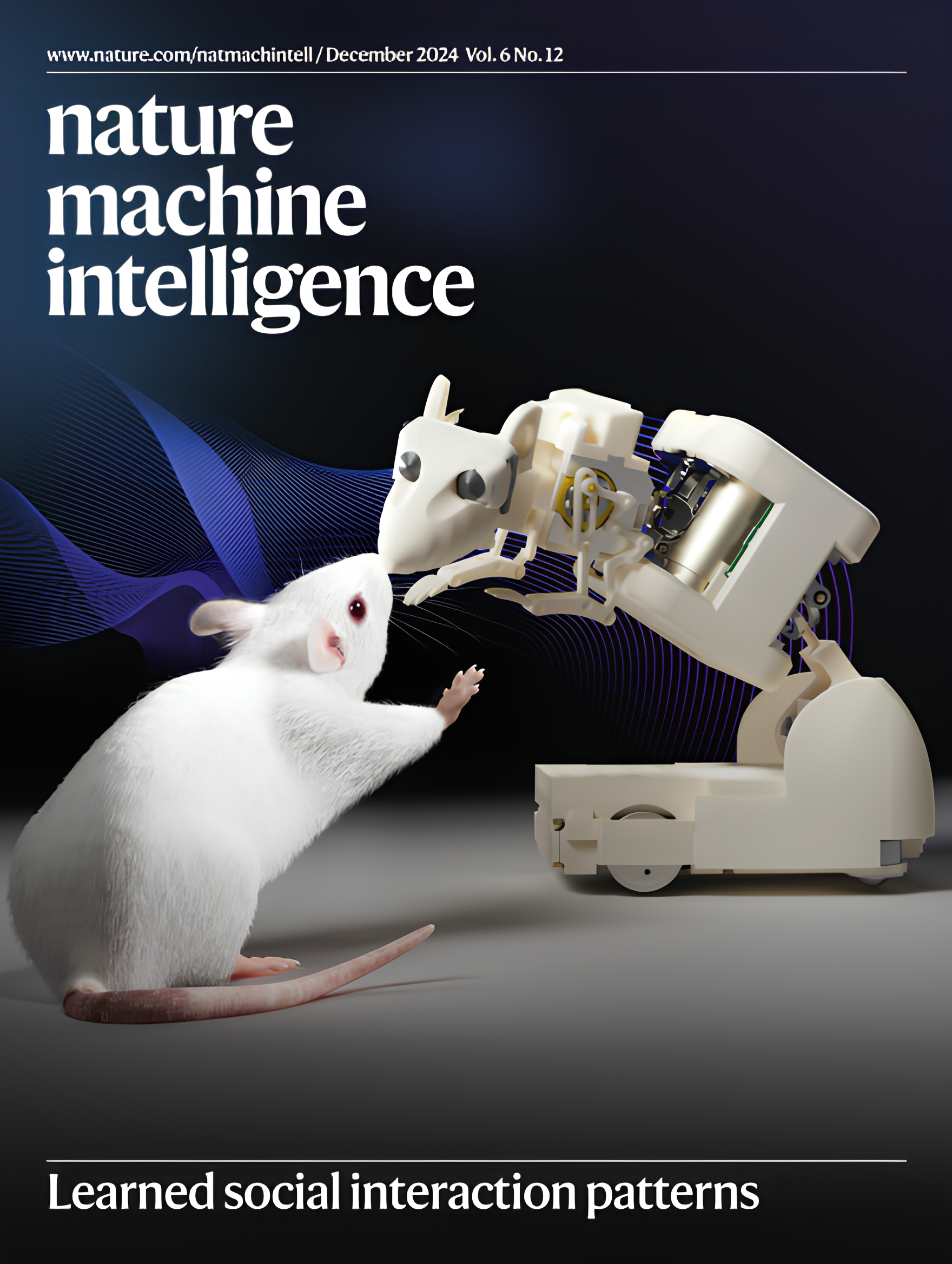
Art work of our Nature Machine Intelligence paper.
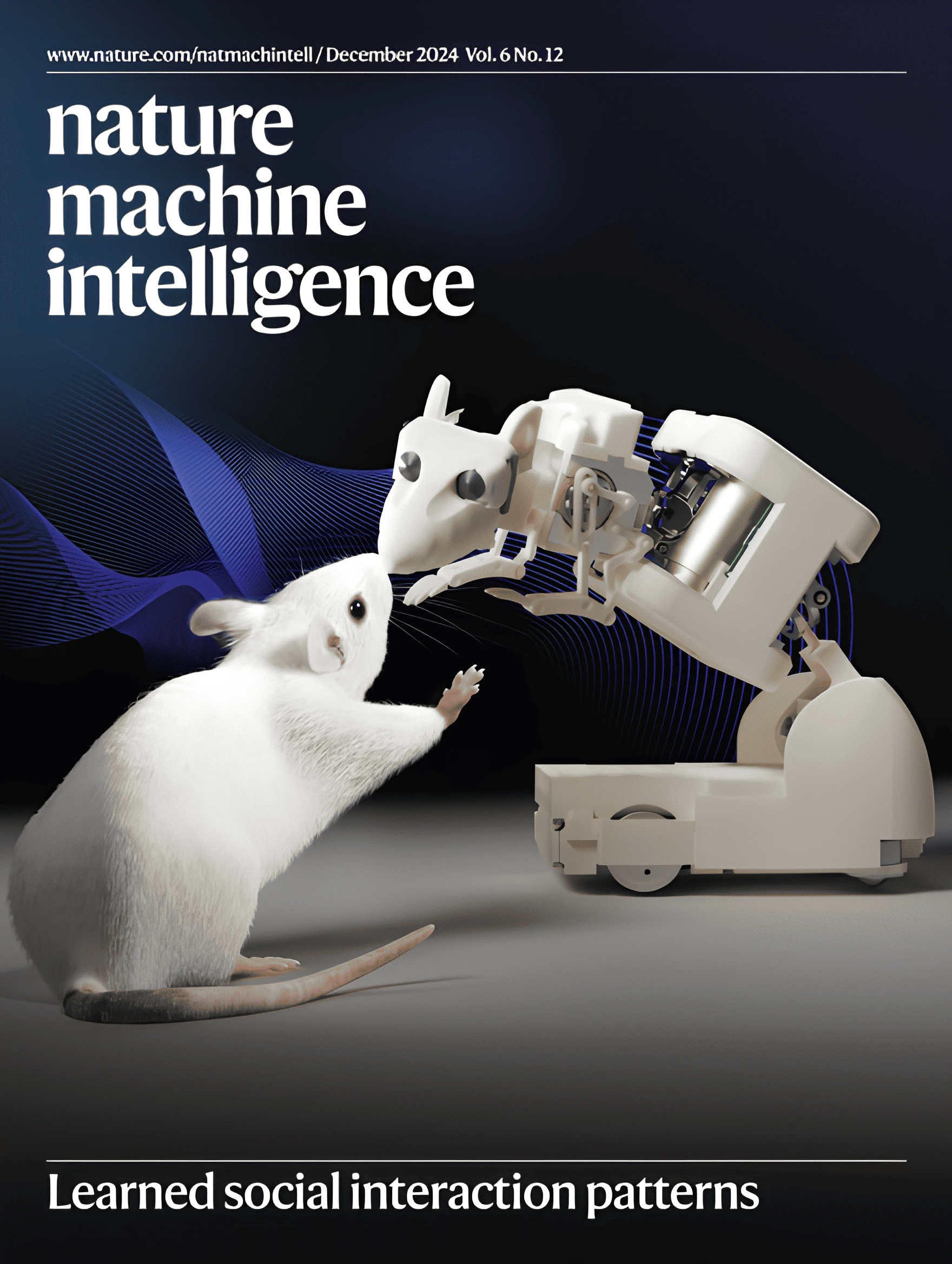
Cover of Nature Machine Intelligence
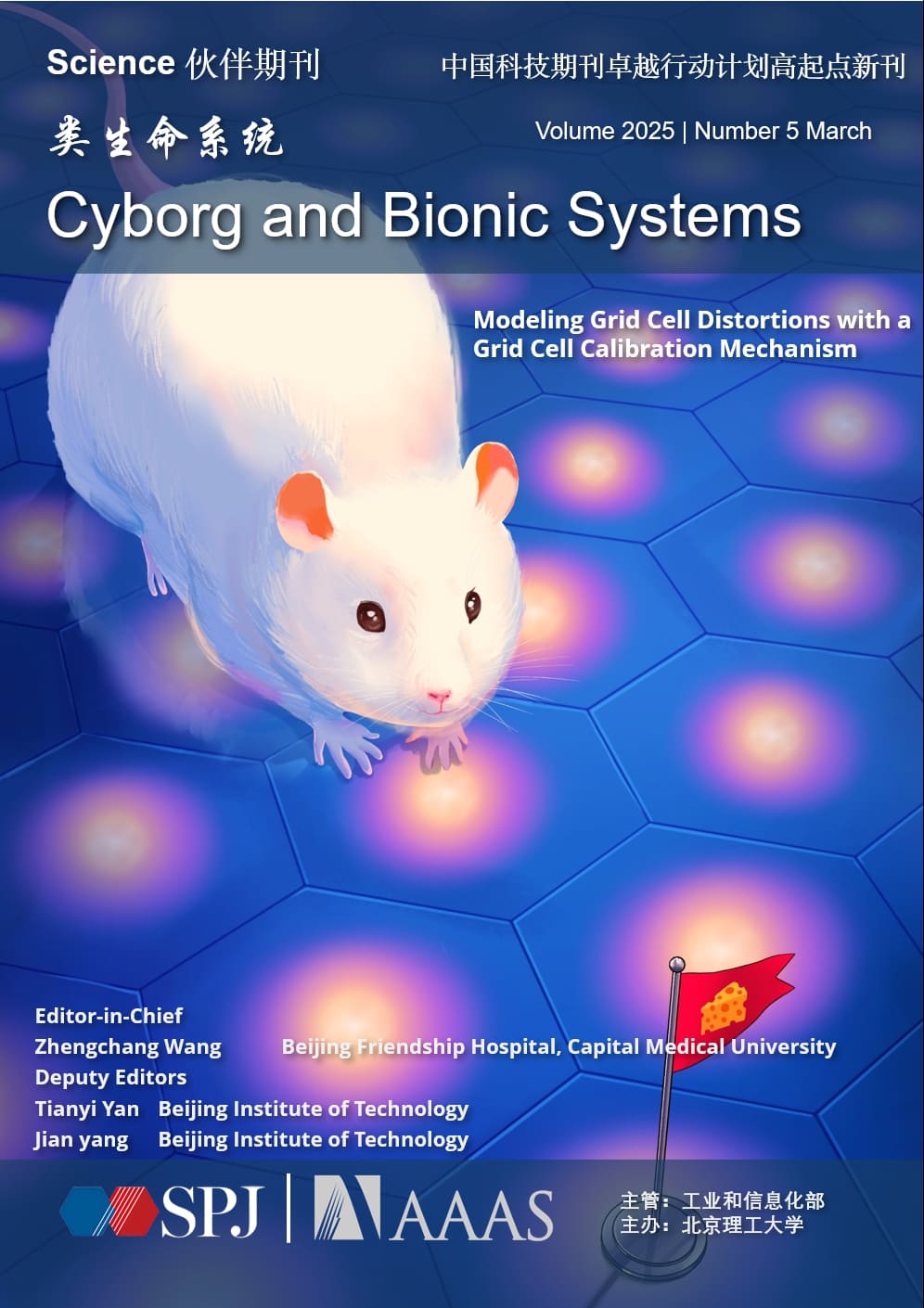
Cover of Cyborg and Bionic Systems

Snake-like robotic arm.

Snake-track robot.

Snake-like robot.
Research areas
Robotics
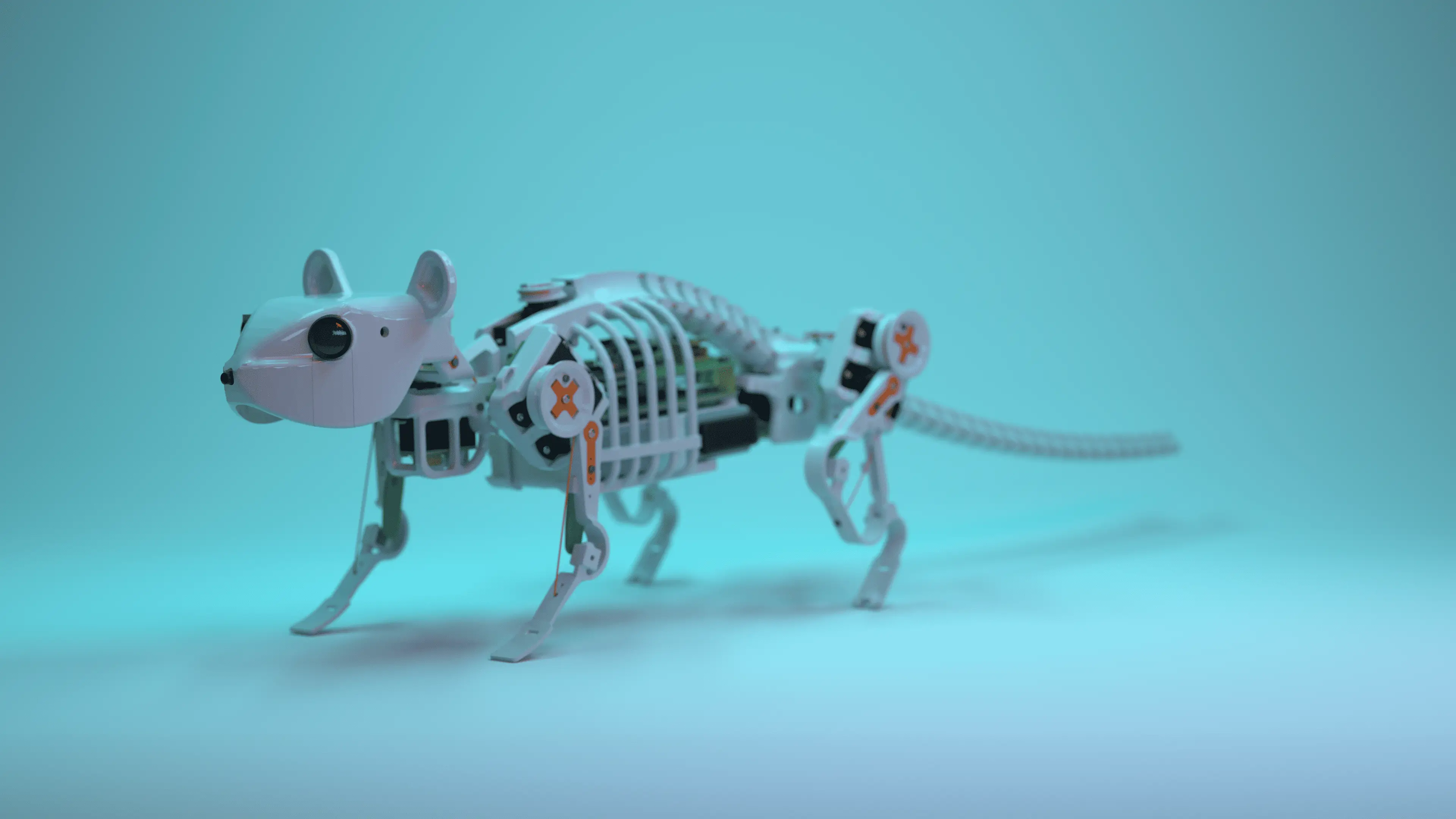
We explore the design, control, and application of diverse robotic systems—including rat robots, snake robots, robotic arms, and humanoid robots—to advance intelligent, adaptive, and multifunctional automation across complex environments.
Embodied Intelligence

This research focuses on embodied AI, foundation model, and reinforcement learning to enable intelligent agents that can learn, adapt, and act effectively in real-world environments through physical interaction and large-scale knowledge integration.
News
| Jul 2, 2026 | Four papers are accepted to the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026! |
|---|---|
| May 31, 2026 | Our recent work “Bridging Language and Action: A Survey of Language-Conditioned Robot Manipulation” has been conditionally accepted by International Journal of Robotics Research! Read the preprint version at here! |
| May 30, 2026 | Our recent work “Pushing physical limits and uncovering motion templates of spine-based quadruped locomotion via reinforcement learning” has been published by IEEE Transactions on Robotics! Read it at here! |
| Oct 17, 2025 | Our recent work “Enhancing Platform Climbing Capability Through Lateral Spinal Flexion on a Bioinspired Rat Robot” has won the Best Student Award and the Best Conference Award Finalist! |
| Jun 22, 2025 | Five papers have been accepted by IROS 2025. |
| Jan 13, 2025 | Seven papers have been accepted by ICRA 2025. |
| Jan 6, 2025 | Our recent work “Preserving and combining knowledge in roboticlifelong reinforcement learning” has been published by Nature Machine Intelligence! Read it at here! |
| Dec 5, 2024 | Our recent work “Modulating emotional states of rats through a rat-like robot with learned interaction patterns” has been published by Nature Machine Intelligence! Read it at here! This work is also featured as the cover of the issue in December 2024! |
| Dec 6, 2023 | Our recent work “Lateral flexion of a compliant spine improves motor performance in a bioinspired mouse robot” has been published on Science Robotics! |
Selected Publications
-
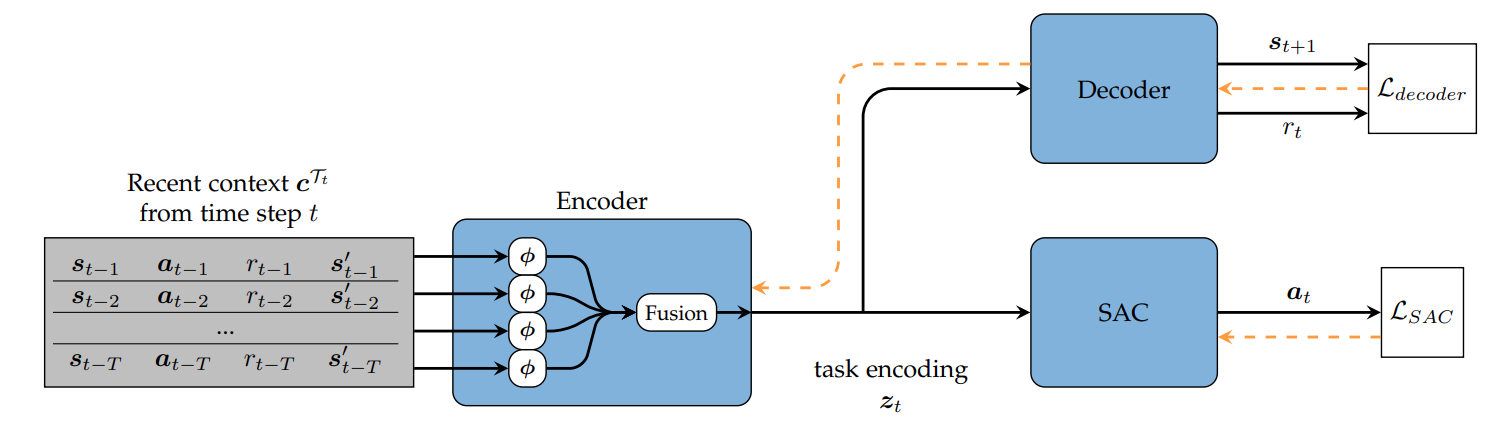
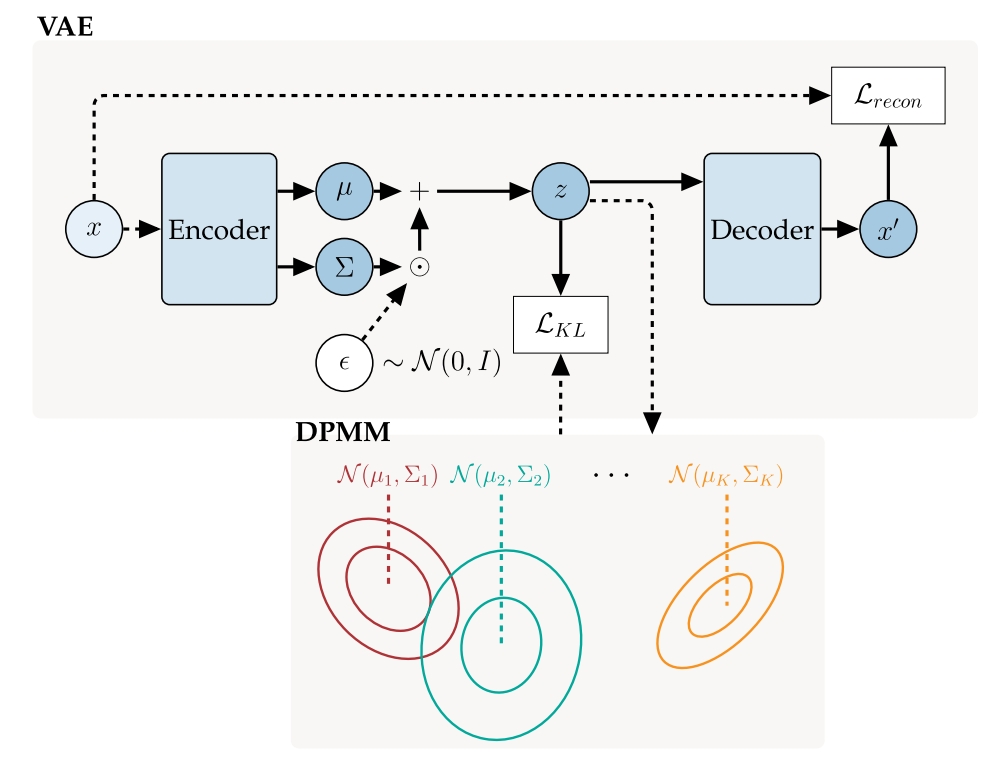 Context-Based Meta-Reinforcement Learning With Bayesian Nonparametric ModelsIEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) 2024
Context-Based Meta-Reinforcement Learning With Bayesian Nonparametric ModelsIEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) 2024 -
 Modulating emotional states of rats through a rat-like robot with learned interaction patternsNature Machine Intelligence 2024
Modulating emotional states of rats through a rat-like robot with learned interaction patternsNature Machine Intelligence 2024 - TR-OPushing physical limits and uncovering motion templates of spine-based quadruped locomotion via reinforcement learningIEEE Transactions on Robotics 2026
- IJRRBridging Language and Action: A Survey of Language-Conditioned Robot ManipulationThe International Journal of Robotics Research 2026